About
The rapid proliferation of e-commerce has created an ever-growing demand for faster and cheaper deliveries. Our project aims to provide a legged-based delivery solution for urban environments, where obstacles like stairs and curbs impede traditional wheeled robots. An articulated hexapod robot will navigate through any rough terrain with ease and perform fast and cost effective deliveries.
Overview
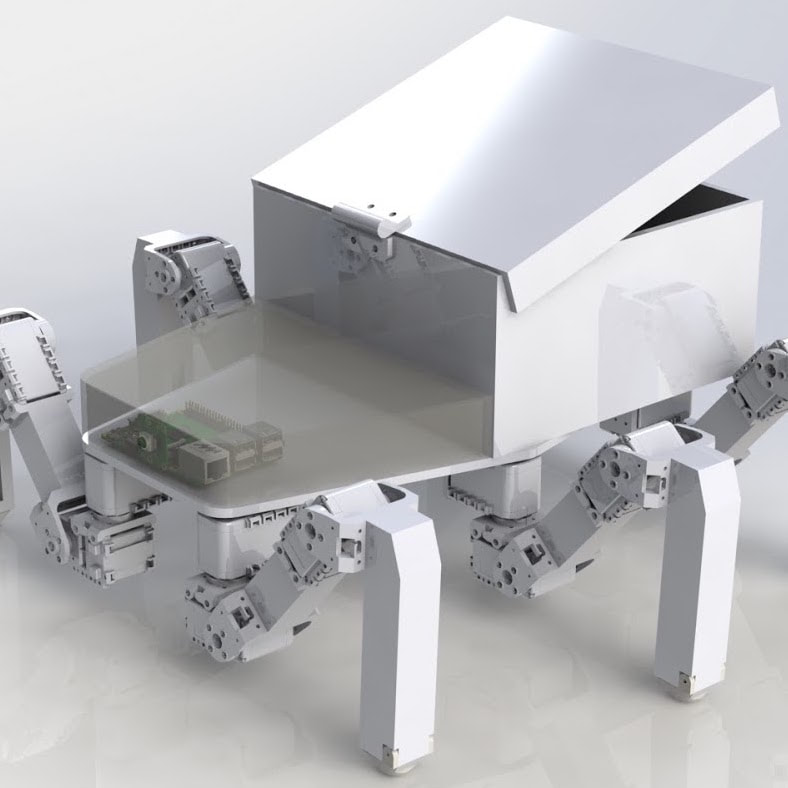
We used a hexapod robot design for our solution, and designed the mechanical, electrical, and controls aspects of the prototype. We created CAD models of the hexapod’s legs, chassis, electronics box, and package container, and selected the ROBOTIS AX-12A motors given our size and package weight requirements.
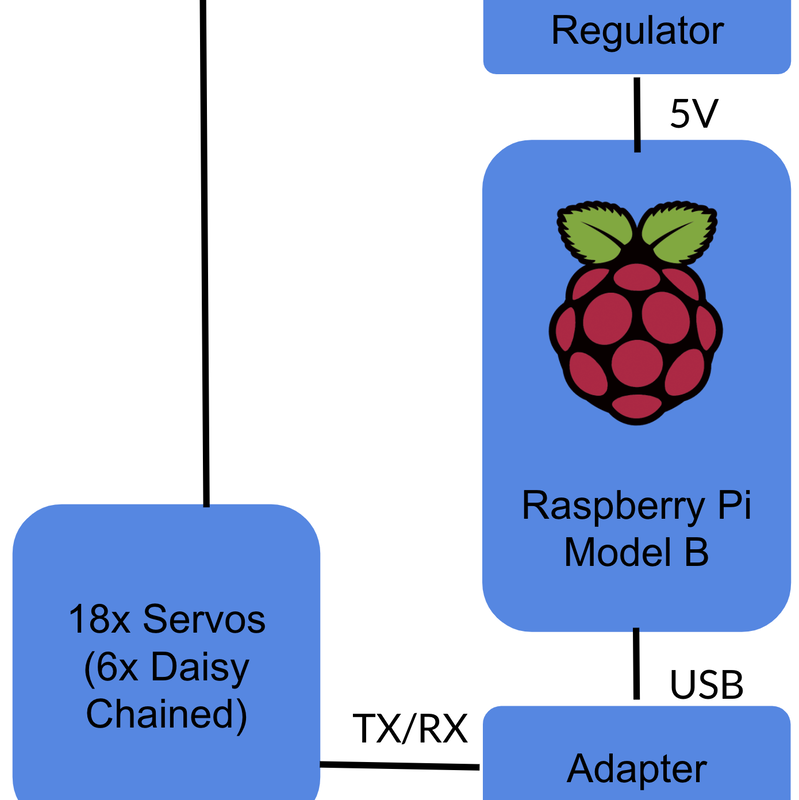
We created an electrical schematic for our robot, consisting of multiple sensors, a camera, a Raspberry Pi 3 controller, and powered by a 3-cell LiPo battery. The motors will be directly powered by the battery whereas the Raspberry Pi and connected sensors are to be powered via 5 volts.
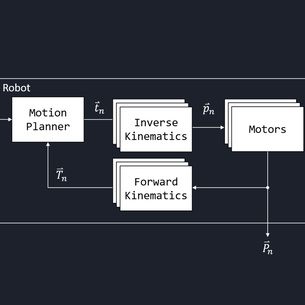
We developed an encapsulated control hierarchy for the robot. We developed the mathematical expressions for path and motion planning, and we aim to implement an advanced motor controller for smooth end-effector motion for navigation.
We created an electrical schematic for our robot, consisting of multiple sensors, a camera, a Raspberry Pi 3 controller, and powered by a 3-cell LiPo battery. The motors will be directly powered by the battery whereas the Raspberry Pi and connected sensors are to be powered via 5 volts.
We developed an encapsulated control hierarchy for the robot. We developed the mathematical expressions for path and motion planning, and we aim to implement an advanced motor controller for smooth end-effector motion for navigation.