
Mid-Level: Legs
The mid-level controller sends signals to each individual motor controller given the high-level control signal. The end-effector trajectories are a pair of velocity and position vectors for each end-effector computed by the motion planner using rigid-body dynamics. The end-effector trajectories are converted into motor trajectories, a pair of angular positions and velocities for each motor, using the inverse kinematic equations and their derivatives.
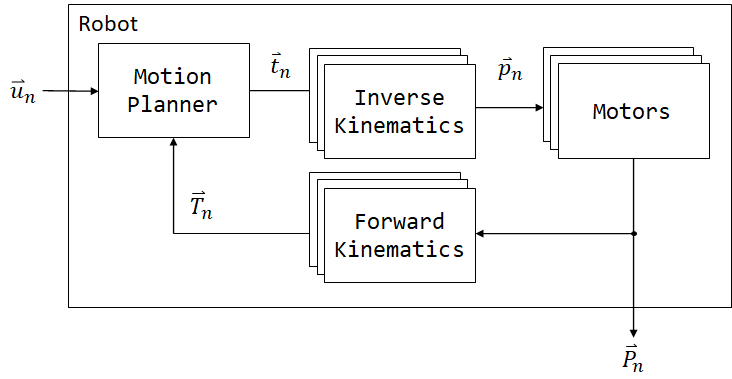
Mid-level (leg) control loop of the robot.
Low-Level: Motors
The low-level motor controller is shown below. The controller configuration is straightforward but the controller D[z] implements two-dimensional control of both motor velocity and position. This is to ensure smooth movement of the end-effector along its trajectory.
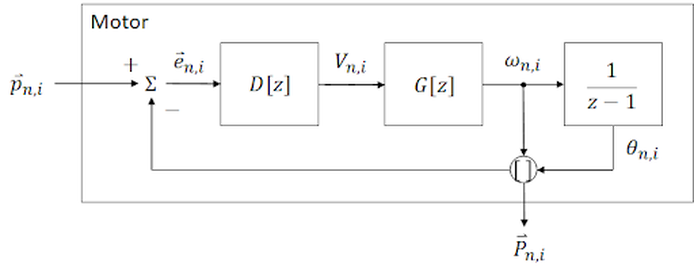
Low-level (motor) control loop.
Bluetooth Control
Successful motion was achieved through the form of bluetooth, namely that of a Nintendo Switch controller. The following setup was programmed: the left thumbstick controls forward, backward, and lateral movement, the right thumbstick controls turning, and the directional buttons perform tilting of the robot. With these three main movements, the robot is able to achieve complex and precise motions that allow it to traverse rough terrain easily and effectively.
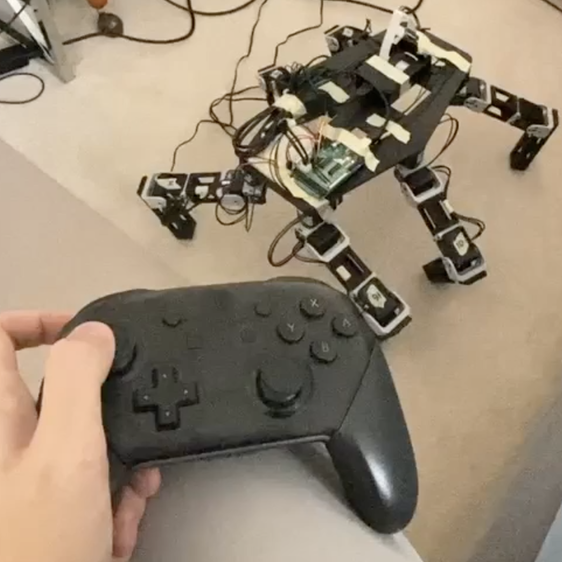
Full movement control via Nintendo Switch contoller.
Stair Traversal
With the control software fully implemented, the robot is able to successfully perform our desired goals to meet the criteria of the project. More specifically, the robot is able to swiftly climb sets of stairs with ease, as shown in the image below, something that traditional wheeled or treaded robots are unable to do due to their design. Thus, we have successfully designed a robot capable of complex traversal, namely that of stairs, which is a major milestone in the development of advanced delivery robots.

Full traversal of custom-made stairs.
Package Delivery
In addition to the robot's ability to traverse stairs, it is also able to deliver packages that meet the carrying weight and package dimension constraints set for the project. In the image below, you can see that it is capable of delivering a full 18 inch sized MacBook Pro package to its destination via the bluetooth control mentioned previously. Thus, this leads to successful completion of our project, as we satisfied all our constraints (carrying weight, package dimensions, speed, and size) and criteria (navigation ability, range, speed, and design complexity).
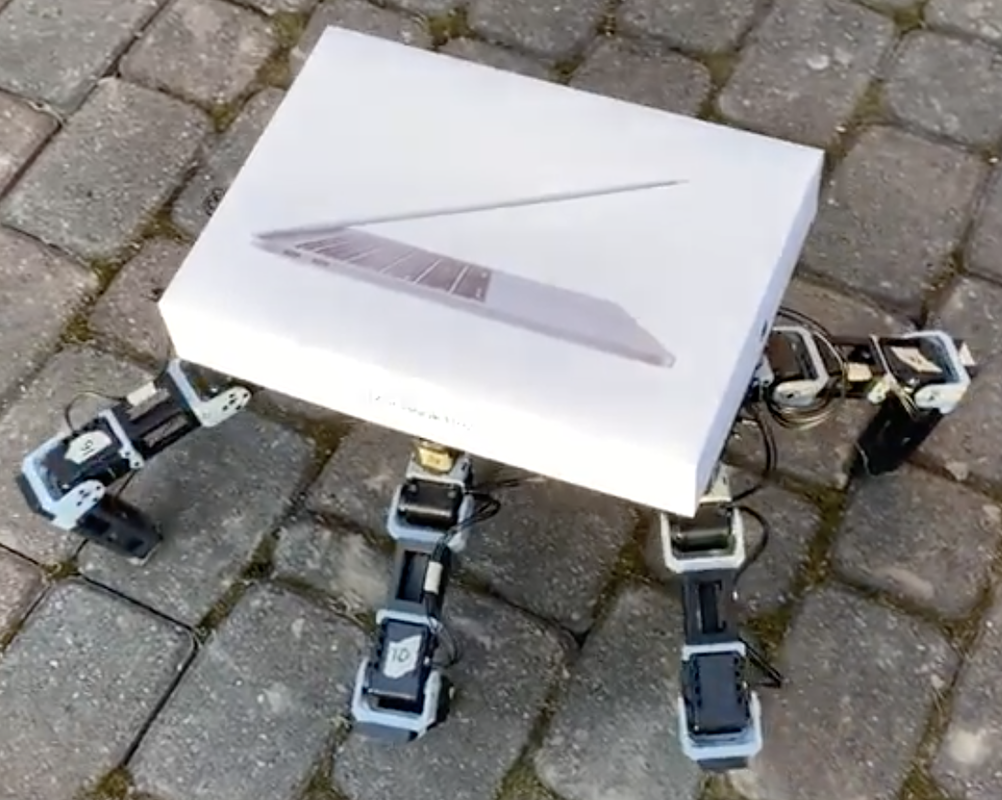
Delivery of a MacBook Pro package.
