
Torque Analysis
Based on the design constraints for package size, calculations were done using estimated values of leg lengths and robot weight to determine a preliminary stall torque necessary at each leg joint. As the fastest movement speed of the hexapod occurs with a wave gait of alternating tripods, where 3 legs move while the others remain stationary, this stall torque was determined with the consideration for just 3 legs holding the weight of the static robot. This calculation resulted in a minimum torque of 0.341 Nm at the hip joint which was then used for motor selection.
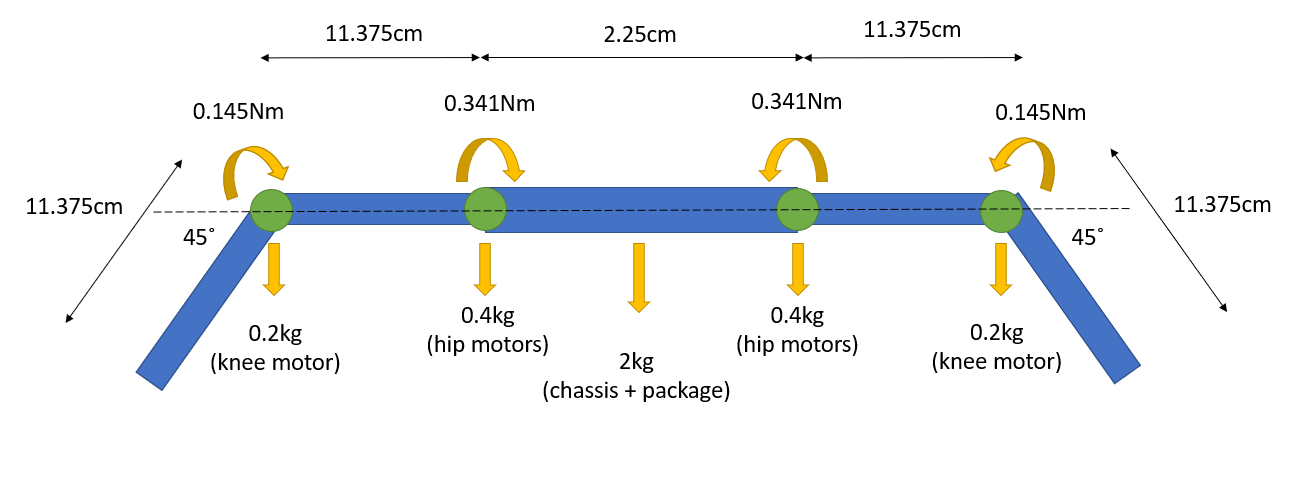
Torque analysis.
Motor Selection
A more specialized robot motor designed specifically for leg joint operation was required, so the ROBOTIS AX-12A was selected. With a maximum torque of 1.5 Nm, this motor comfortably satisfies the minimum torque specifications from above. Furthermore, it already integrates an encoder and control electronics, to aid with development, while remaining lightweight at 54.6 g.
Leg Design
Using the chosen motor and its commercial connectors as a base, the legs were designed to meet our specified leg lengths. The stress concentrations in the leg assembly were verified using FEA. From the simulation, it can be seen that the maximum stress is approximately 45 MPa, resulting in a safety factor of 1.56; as this simulation was conducted under worst case scenarios, this is perfectly acceptable.
Leg Print-Out
From SolidWorks to real life, the parts for the legs were 3D printed and connected together with the motors. Modifications were made compared to the leg design shown above, mainly being the cutouts on all sections of the leg (outer, middle, and inner), to save on material and weight. Other than that, we stuck to our design and printed this six times for all legs of the robot.
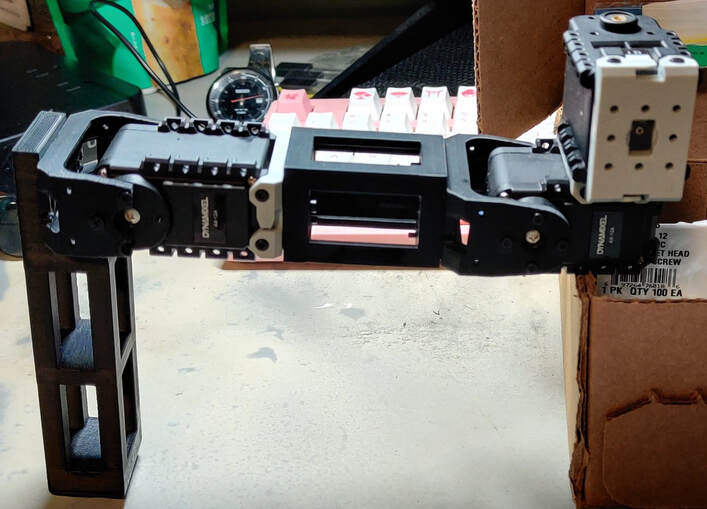
Print-out of one of six legs for the robot.
Mechanical Prototype
Here is the assembly prototype of our robot, six legs mounted at the bottom of each corner of its chassis, fit with cutouts on the body for the electrical components. The robot also features a casing for the payloads to deliver its packages, to protect them from its components and outside environment. Its intricate leg design allows the robot to assume many positions to navigate efficiently and effectively, and its large chassis makes it able to deliver sufficiently large packages to achieve the goals of the project.
