
|
3/5/2021 0 Comments Various UpdatesWe started to work on the electrical side of things, namely putting together our perfboard for the robot. It's currently in the works and we'll provide an update once it's completed. Here's an early image of our progress so far (still more to go):  Next, we designed a set of stairs for our robot to traverse for the upcoming demo. To put some measurements out there, the stairs are 32 inches wide and 4 inches tall for each step. Since our original plan was to build a full scale model capable of traversing normal sized steps, now that we have scaled down our prototype, we also scaled down the steps. Stairs are commonly known to be 7 inches tall for each step, so we determined scaling it down to 4 inches for our robot is reasonable: 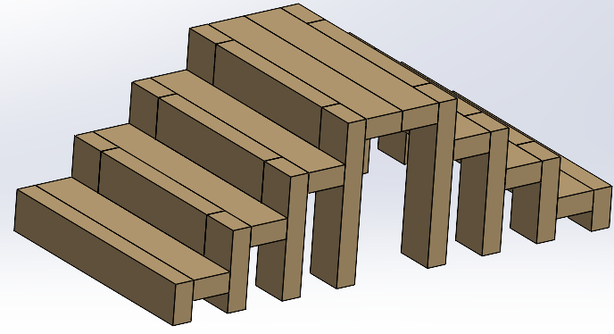 Lastly, we started wiring up some of the components together on our robot. In particular, we wired up our motors on its legs to our main controller on the chassis. Also, we began working on the controls side of things, since we now have most of the mechanical and electrical components integrated together. We were able to successfully control the motors with our controller, early signs of life for our robot. Here is an updated image of our robot, with its "son" as its payload: 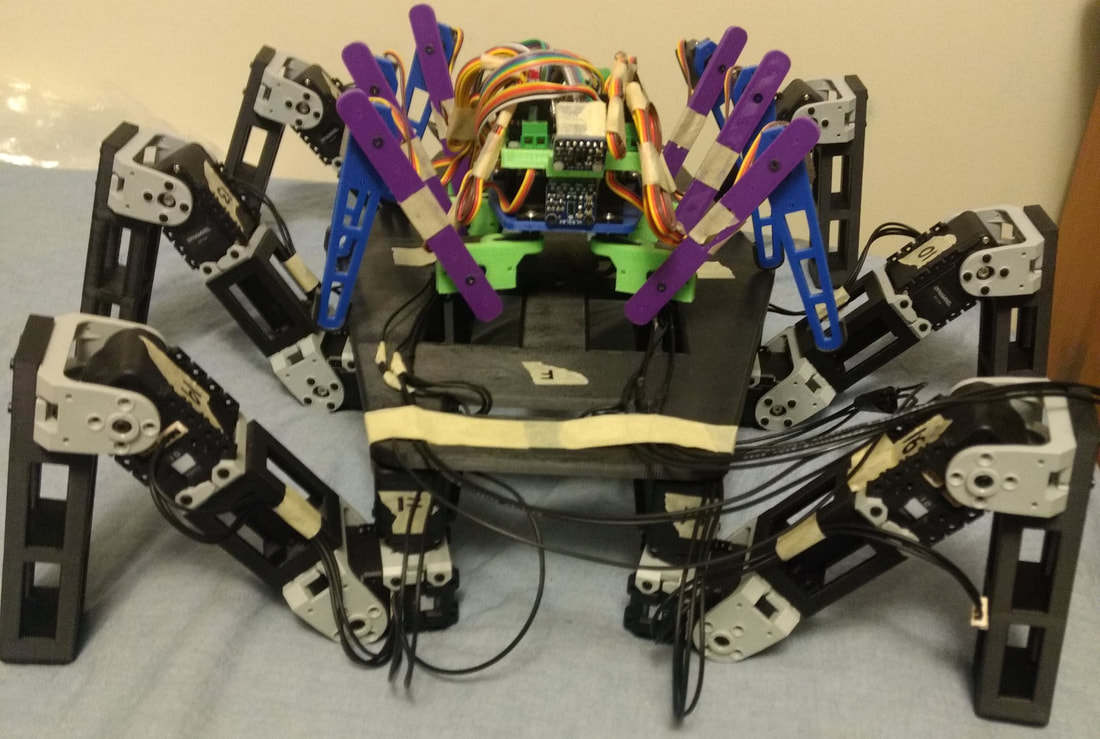 We have a progress demo coming up next week and we're working to get our robot ready for that. We're looking to finish up the electrical work as soon as we can, as well as start to dive deep into the controls programming of the robot. Once this is done, the only deliverables left for the robot are to implement the motion planning and the battery.
0 Comments
Leave a Reply. |
Search by typing & pressing enter
