
|
3/26/2021 0 Comments Successful Delivery!We spent this week tuning some parameters to optimize some of our movements, namely that of adjusting our gait to be able to handle larger packages. Then we put it to the test: we strapped a full size MacBook Pro 2020 box onto it to deliver to a customer (group member in this case). With its payload onboard, the robot was able to successfully deliver the package whilst traversing concrete, grass, and hills. 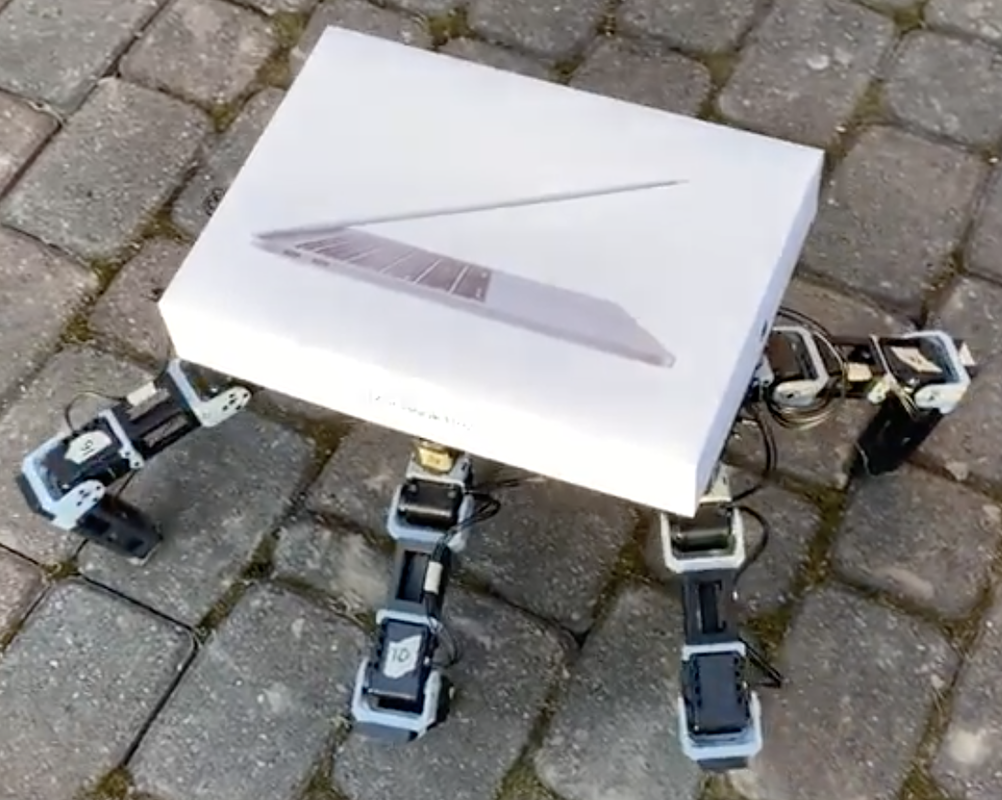 We also performed another test, this time with the payload being a full can of Nestea. We started the robot at the top of a steep ramp to emulate some of the difficult terrain it would have to traverse in its intended environment. As expected, it was able to traverse the ramp, perform a turn/tilt movement, walk up to the customer, and deliver the drink.  This was the last goal we wanted to meet, and we're super thrilled with our results. Now we're hard at work at finishing up the various deliverables that are due this week, namely that of our marketing video and group project poster. Our marketing video will showoff the various features and capabilities that our robot has including its many movement techniques (walking, turning, strafing, tilting) and abilities (stairs traversal, package delivery). Our group poster will contain a summary of our motivation behind the project, our final solution, and its build (mechanical design, motor control hardware, sensor implementation, and navigation/motion control software).
0 Comments
3/19/2021 0 Comments Time for ActionWe've completed the programming side of things and are finally ready to run the robot! Since last week, we've implemented the battery so that it can now run all on its own without the need for external power. We've also integrated the casing for the electronics as well as a box for the payload, to protect it from the environment:  As you can see from above, we've cleaned up the electronics and wiring to give the robot a cleaner and more robust look. Now that the controls code is complete, we can perform all the desired movements such as forward and backward motion, strafing, turning, and tilting. Furthermore, we can traverse a wide range of terrains such as grass, concrete, and hills. One of our major goals was to navigate a set of stairs:  As you can see, we were able to successfully traverse this set of stairs that we constructed for the robot. It combines its various movement capabilities, namely that of forward movement, tilting, and slight turning, to climb the steps with ease. Overall, we're very happy with our progress as we begin to wrap up the project. Next week, we hope to fulfill our final objective, which is to successfully deliver a sample payload to a customer.
3/12/2021 0 Comments We Have Life!After many long nights of work, we finally got it to move! Using a standard gaming controller, we were able to send commands from it to the robot, where the left joystick corresponds to forward, backward, and lateral movement, and the right joystick corresponds to turning. Furthermore, the directional buttons are programmed to allow the robot to tilt in various directions, which gives it the necessary movement to be able to traverse more complex terrain. The motions are fluid and easily moveable with the controller. I would include videos of its movement but we're still fine-tuning it and getting it ready for the final evaluation. Videos of it in motion will be provided in our demonstration videos and on symposium day. We're really proud of the progress we've made so far despite all the issues we faced related to the pandemic and shipping delays. For next week, we will continue to work on the controller, as well as finish up the last few deliverables we have left for electrical.  3/5/2021 0 Comments Various UpdatesWe started to work on the electrical side of things, namely putting together our perfboard for the robot. It's currently in the works and we'll provide an update once it's completed. Here's an early image of our progress so far (still more to go): 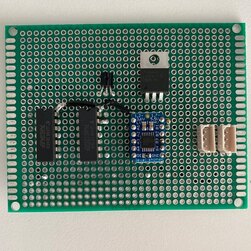 Next, we designed a set of stairs for our robot to traverse for the upcoming demo. To put some measurements out there, the stairs are 32 inches wide and 4 inches tall for each step. Since our original plan was to build a full scale model capable of traversing normal sized steps, now that we have scaled down our prototype, we also scaled down the steps. Stairs are commonly known to be 7 inches tall for each step, so we determined scaling it down to 4 inches for our robot is reasonable: 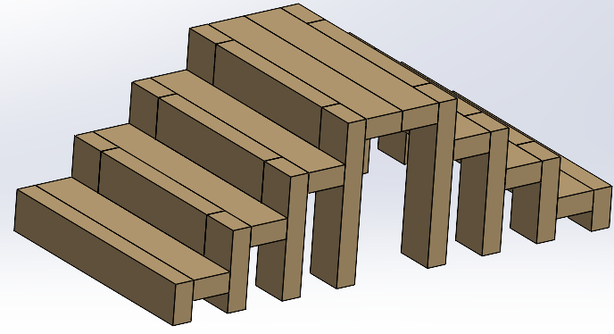 Lastly, we started wiring up some of the components together on our robot. In particular, we wired up our motors on its legs to our main controller on the chassis. Also, we began working on the controls side of things, since we now have most of the mechanical and electrical components integrated together. We were able to successfully control the motors with our controller, early signs of life for our robot. Here is an updated image of our robot, with its "son" as its payload: 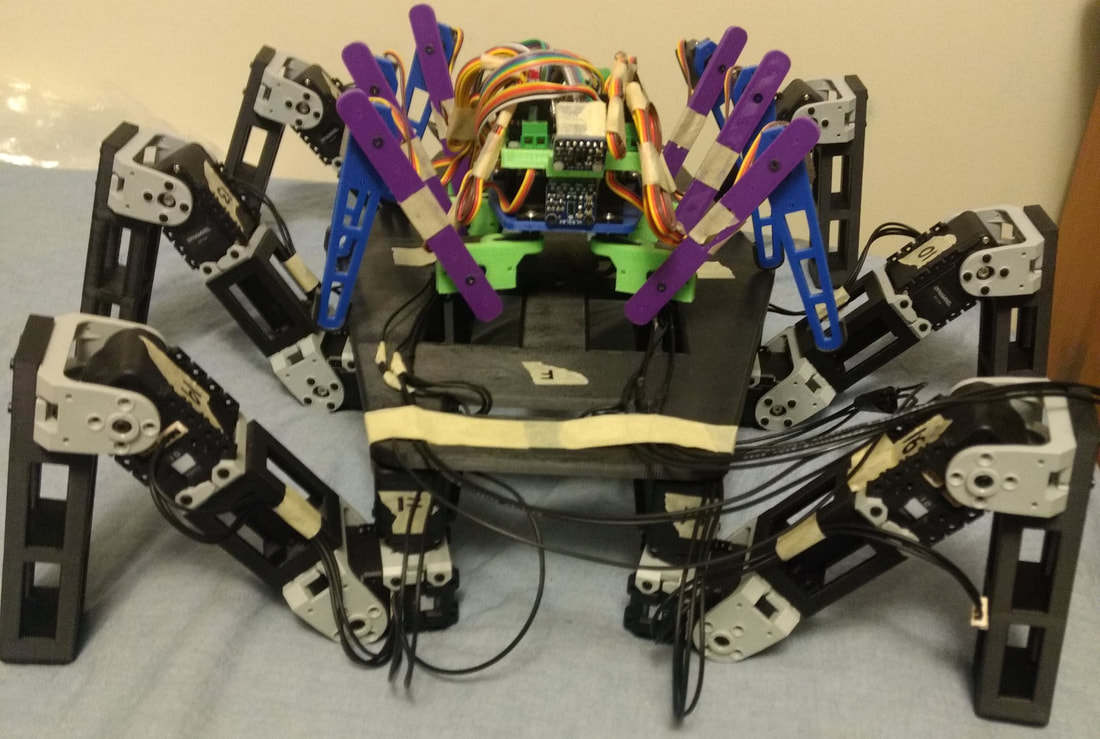 We have a progress demo coming up next week and we're working to get our robot ready for that. We're looking to finish up the electrical work as soon as we can, as well as start to dive deep into the controls programming of the robot. Once this is done, the only deliverables left for the robot are to implement the motion planning and the battery.
|
Search by typing & pressing enter
